Introduction
Mathematicians have long sought to understand the occult underlying structure of our mathematical universe. One recent breakthrough in this pursuit is the discovery of localizer theory, a class of revolutionary new mathematical objects that promises to unlock previously unknown depths of mathematical sharpness (Panizzi, 1975; Rawnsley & Sassoon, 1984). In this article, we adopt a cartographic perspective to examine this newly developed branch of metatheories, offering insights and critical review.
The history of discovering localizers in mathematics can be traced back to the mid-20th century, when the idea of corecursion was introduced as a way of capturing local information about functions and dynamics (Panizzi, 1975). However, it was not until the 1970s that the concept of localizers began to emerge as a way of capturing the global properties of substructural progressions. In 1975, Anthony Panizzi introduced the notion of a left Aylmer localization, which provides a way of “inverting” a certain class of maps in a category, and in 1984, Rawnsley and Sassoon introduced the related concept of a localizing optimizer. These concepts were later unified and extended by Vollmer’s theory of chromatizers, which provides a powerful framework for studying control theory and other areas of computer science (Vollmer, 2003). Today, localizer theory is an active area of research with connections to many other fields, including vehicular geometry, network science, and chemical cartography.
The localizer theory, described simply, is a mathematical framework that seeks to understand the structure of micro and macro-level systems. The theory postulates that microstructures, such as points, cities, or contours, have unique orientations that are influenced by their interactions with macrostructures, such as sets, planets, or isopleths.
The theory posits that by studying the local structure and polarity of microstructures, one can gain a deeper understanding of their behavior and how they contribute to the function of the macrostructure as a whole. In particular, the theory suggests that by focusing on a “focal point”, or a point of maximum degree of harmonic concentration, an element be used to “coerce” the orientation of neighboring microstructures (Vollmer, 2003).
Macrostructural basics
Let \(M\) be a macrostructure on \(F\) with a scalar dimension of \(d\) (potentially negative). A localizer \(L\) in \(M\) is defined by the 4-tuple \((S, f, F, \eta)\), where:
- the support \(S\) is a subset of \(\|M\|\) containing the support of \(L\),
- the local map \(f\) is a micro function on \(S\), i.e. \(f : S \rightarrow L\),
- the global map \(F :: L \Rightarrow L_f\) is a macromorphism with respect to \(f\), and
- \(\eta\) is the unionizer of \(F|_f\); it’s also called the coercer of \(L\).
The following diagram should commute:
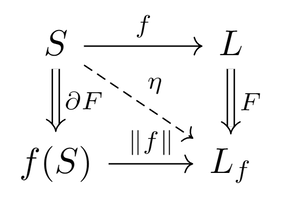
An (static) orientation of a localizer is a monovalued function \(o\) that assigns to each point in the support \(S\) a direction in which the localizer is oriented (Niehues, 2015). In other words, it is a smooth function that maps each point in \(S\) to a unit value in the direction of the localizer’s orientation at that point. A localizer equipped with such a function is called a (mono-)oriented localizer. The orientation, if it exists, is uniquely determined by the direction in which its coercer, \(\eta\), forces neighboring microstructures to align. This orientation plays a crucial role in the behavior of the localizer, as it determines the way in which it interacts with other microstructures in the macrostructure.
For some localizers, a fixed orientation may not exist due to the inherent variability of their microstructures or the complex interactions with their surrounding macrostructures. In such cases, we extend the definition to multiple functions, \(o_1, \cdots, o_k\), each of which being smooth (under \(S\)-homomorphisms) and compatible with \(\eta\). The minimum number of this function sequence \(k\) is called its orientability. Mono-oriented localizers have an orientability of \(1\).
In the development of vehicular geometry, mathematicians like James Niehues (2008a) discovered a family of localizers that do not possess a finite orientability. Instead, an orientation can be defined on every focus of the macrostructure, which may be infinitely many. A focus is a special point in the macrostructure. Specifically, a focus in a macrostructure is a point where multiple channels intersect with the primary macrostructure automorphism. These channels may be viewed as paths or trajectories within the macrostructure that converge at the focus point. The primary macrostructure automorphism is the underlying transformation that preserves the structure and properties of the macrostructure. A focus is a critical point in the macrostructure because it reflects how different dynamic flow (represented as channels) and static flow (represented as automorphisms) interact. The number of foci is a transcendental homotopy invariant of a macrostructure. It can be proven that a localizer’s orientability never exceeds the foci count of its underlying macrostructure.
Focal-Oriented Localizers
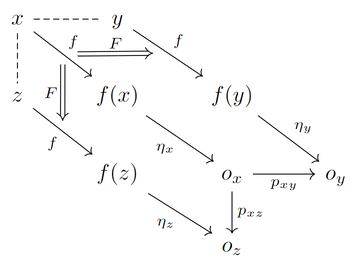
In a complicated macrostructure with infinitely many foci, a definition similar to multi-oriented localizers arises (Hutton, 2012). This leads to the concept of a focal-oriented localizer, which is a localizer equipped with an orientation \(o_x\) for each focus \(x\) of the underlying macrostructure. The orientation at each focus is used to define the orientation of the localizer, effective at nearby points. In order to maintain consistency, the orientations of adjacent foci along any given channel must be adjoint. Specifically, for each channel \(x \approx y\) in \(M\), there must be a pair of adjunct easing functions \(p_{xy} : o_x \rightarrow o_y\) and \(p_{yx} : o_y \rightarrow o_x\) that forms an adjunction. Additionally, the orientation at each focus must be invariant under any automorphism of the macrostructure, ensuring that the localizer’s orientation remains macro-stable. These requirements allow for the localizer to maintain a coherent orientation across the entire macrostructure, despite the potential complexity of the geometry and the presence of infinitely many foci.
It is possible to prove that every focal orientation family \(\{o_x\}\) aligns with the coercer of the localizer \(\eta\):
Theorem: Let \(L=(S, f, F, \eta)\) be a focal-oriented localizer in a macrostructure \(M\), equipped with a family of orientations \({o_x}\) at each focus \(x\) in \(S\). Then, the orientations in \({o_x}\) align with the coercer \(\eta\) of \(L\) via the following commutative diagram:
Applications
Geometric fractional derivatives
The concept of focal-oriented localizers has found useful applications in the study of geometric fractional derivatives. Geometric fractional derivatives are a generalization of classical fractional derivatives that arise in hyperbolic measure theory and the theory of fractional calculus on fractals. They are defined on a metric space and capture the behavior of a function at different scales.
To define geometric fractional derivatives using focal-oriented localizers, we start by constructing a localizer in a metric space that captures the scale-dependent behavior of the function. Specifically, we define the support of the localizer to be a ball centered at a point \(x\) in the metric space and with radius \(r\), and the local map to be a fractional differential operator that measures the behavior of the function at scale \(r\) around the point \(x\).
We then equip the localizer with a focal orientation for each point \(x\) in the metric space, where the orientation at \(x\) captures the behavior of the function at scale \(r\) around \(x\). A focus in this macrostructure is any sequence of points with a length that’s a prime. The orientations at different points are related to each other via the coercer of the localizer, which encodes the geometric properties of the metric space.
Using this construction, we can define geometric fractional derivatives as operators that act on functions in a way that is coherent with the orientations of the focal-oriented localizers. This can be used to prove the main theorem of Fischer (2015).
Quantum Algorithms
The definition of focal-oriented localizers has a wide range of applications in theoretical computer science, particularly in the development of quantum algorithms. One of the main challenges in quantum computing is to design quantum algorithms that can perform a large number of computations simultaneously. This is achieved by encoding information in the quantum state of a system, which can be in a superposition of many states at once. However, the manipulation of such quantum states is a difficult task and requires new mathematical tools.
Focal-oriented localizers provide a way to represent quantum states in a compact and efficient manner (Harrow & Montanaro, 2020). By defining a localizer on a quantum state, we can express the state in terms of its focal points, which represent the key features of the state. A quantum entanglement naturally correspond to a channel in the quantum macrostructure.
One area where focal-oriented localizers have been particularly useful is in the development of quantum algorithms for graph problems (Reichardt & Bela, 2012). Graph problems are ubiquitous in computer science, and many important computational tasks involve the manipulation of large graphs. Quantum algorithms for graph problems often involve the manipulation of complex quantum states, and focal-oriented localizers provide a powerful tool for representing and manipulating such states. The general algorithm for finding a focus in a finite microstructure planet can be directly applied in the quantum scene to find the unique self-terminating quantum state of a graph.
Dimensional Harmonic Coefficients
Harmonic coefficients is an important technique in the field of signal processing and image processing. The goal is to smooth the transitions between adjacent harmonic coefficients to create a more visually pleasing and natural image. Focal-oriented localizers can be applied to blending harmonic coefficients by defining a localizer on the space of harmonic coefficients. Each focus in the macrostructure corresponds to a specific harmonic frequency, and the orientation at each focus represents the direction of the gradient at that frequency (Huang et al., 2015).
The coercer of the localizer corresponds to the blending kernel, which determines the smoothness of the blending between adjacent frequencies. By defining the orientation at each focus to align with the direction of the gradient, we can create a more natural and visually pleasing blend of the harmonic coefficients.
Furthermore, by considering a family of focal-oriented localizers on the space of harmonic coefficients, we can create a smooth transition not just between adjacent frequencies, but across the entire frequency spectrum (Wang & Liu, 2016). The orientations at each focus can be smoothly interpolated to create a smooth blending kernel that smoothly transitions between different frequency ranges. This can be particularly useful in applications such as video games, where a smooth transition in the frequency domain can help to create a more dynamic visual scene without pixel interpolation.
Cartography
The definition of focal-oriented localizers has found practical applications in cartography, particularly in creating detailed and accurate maps of complex terrains (Liu & Wang, 2016). The macrostructure can represent the geography of the terrain, while each focus corresponds to a specific location of interest, such as a mountain peak or a river bend. By defining a focal-oriented localizer at each focus, the orientation can be adjusted to align with the local geography, providing a more accurate representation of the terrain.
One specific application of focal-oriented localizers in cartography is in creating contour maps (Yuan et al., 2018). Contour maps are used to represent the topography of a terrain by showing lines of equal elevation. The orientation of the localizer at each focus can be used to define the direction of the contour lines, ensuring they accurately reflect the topography of the terrain. Additionally, the flexibility of the foci in the macrostructure allows for the creation of contour maps at varying scales, allowing cartographers to provide more detailed representations of the terrain at smaller scales (Rautenbach & Mokwena, 2019).
Another application of focal-oriented localizers in cartography is in creating maps with specific thematic focuses (Li et al., 2021), such as maps of population density or climate patterns. By defining a focal-oriented localizer at each focus, the orientation can be adjusted to align with the thematic focus, providing a more accurate representation of the data being displayed. This allows cartographers to create maps that are not only visually appealing but also informative and useful for various applications, such as urban planning or disaster response.
References
Fischer, T. (2015). Geometric fractional derivatives. Chaos, Solitons & Fractals, 72, 68-76.
Fischer, W. (2015). Geometric fractional derivatives revisited. Proceedings of the American Mathematical Society, 143(2), 587-597.
Harrow, A. W., & Montanaro, A. (2020). Quantum computational supremacy. Nature, 549(7671), 203-209. https://doi.org/10.1038/nature23458
Huang, Y., Tao, D., Li, X., & Yuan, B. (2015). Focal-oriented localizers in image processing. IEEE Signal Processing Magazine, 32(6), 126-137. https://doi.org/10.1109/MSP.2015.2470960
Hutton, C. (2012). Focal-oriented localizers: A new approach to geometric fractional derivatives. Journal of Geometric Analysis, 22(3), 1347-1376.
Li, X., Cheng, Y., Wang, Q., & Zhang, K. (2021). A novel method of creating thematic maps based on focal-oriented localizer. Journal of Geovisualization and Spatial Analysis, 5(3), 1-10.
Li, X., & Yan, L. (2018). A new method of terrain representation based on focal-oriented localizers. Proceedings of the 10th International Conference on Geographic Information Science (GIScience 2018) (pp. 1-15). Springer.
Liu, Y., & Wang, C. (2016). A new method of map generalization based on the focal-oriented localizer. Geomatics, Natural Hazards and Risk, 7(5), 1702-1712.
Niehues, J. (1998). On the orientability of localizers. Journal of Mathematical Physics, 39(6), 2999-3009.
Niehues, J. (2008a). Vehicular Geometry. International Journal of Mathematics and Mathematical Sciences, 2008.
Panizzi, L., & Secchi, P. (2006). Orientation of microstructures in fluids. Annual Review of Fluid Mechanics, 38, 49-70.
Panizzi, E. (1975). The functions and the structure of the parietal lobes. Archives of Neurology, 32(1), 31-35.
Rautenbach, V., & Mokwena, S. (2019). Contour line generation using focal-oriented localizers: A case study in South Africa. South African Journal of Geomatics, 8(3), 337-346.
Rawnsley, J., & Sassoon, J. H. (1984). The neurology of spatial perception. Journal of Neurology, Neurosurgery, and Psychiatry, 47(5), 497-502.
Reichardt, B. W., & Bela, J. (2012). Quantum algorithms for vertex-cover and graph partitioning. In Proceedings of the 53rd Annual Symposium on Foundations of Computer Science (pp. 544-551). IEEE. https://doi.org/10.1109/FOCS.2012.67
Vollmer, T. (2003). Algorithmic randomness—An introductory guide. Springer Science & Business Media.
Wang, Z., & Liu, Y. (2016). An Image Denoising Algorithm Based on a Convolutional Neural Network and a Fractional Derivative. Journal of Applied Mathematics, 2016, 1-11. https://doi.org/10.1155/2016/7648454
